A novel bimanual endoluminal robotic platform compatible with standard gastroscopes for endoscopic submucosal dissection: preclinical feasibility and ergonomic evaluation - Report - MDSpire
Advertisement
A novel bimanual endoluminal robotic platform compatible with standard gastroscopes for endoscopic submucosal dissection: preclinical feasibility and ergonomic evaluation
Clinical Report: An Innovative Bimanual Robotic System for Endoluminal Use
Overview
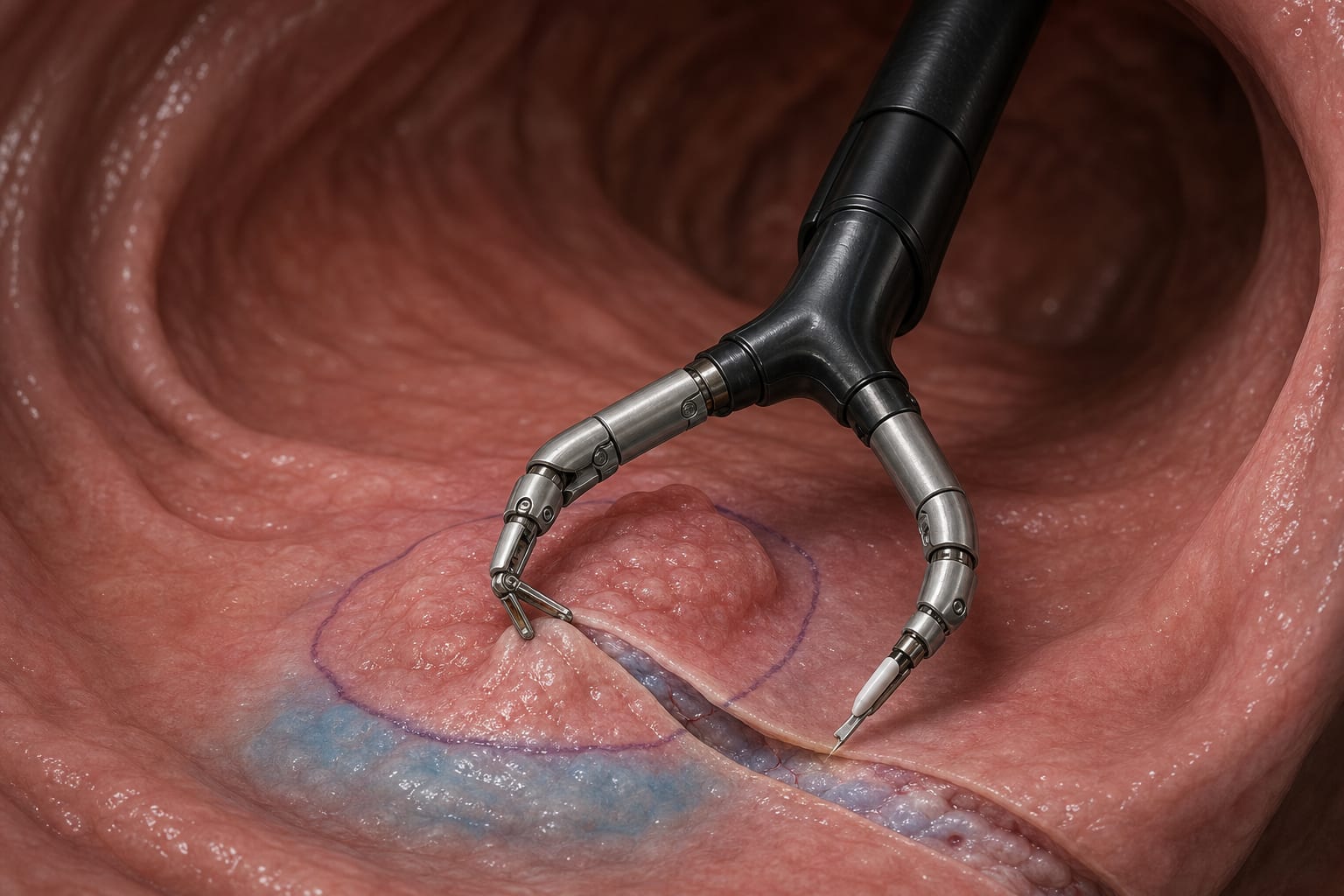
This study evaluates a novel endoluminal robotic platform designed to enhance endoscopic submucosal dissection (ESD) by providing bimanual articulation and counter-traction.
Background
Endoscopic submucosal dissection (ESD) is a critical technique for treating early gastrointestinal neoplasms, offering improved resection rates compared to traditional methods. However, its adoption is hindered by technical challenges and a steep learning curve, particularly in Western practices. The development of robotic systems aims to address these limitations by enhancing dexterity and ergonomics during ESD.
Data Highlights
No numerical data was provided in the source material.
Key Findings
The robotic platform allows for true bimanual coordination during ESD, improving tissue stabilization.
Operators can perform procedures while seated, enhancing ergonomic posture and precision.
The system includes a bipolar electrocautery knife and a grasper for effective dissection and traction.
Robotic assistance may reduce operator workload compared to conventional techniques.
The platform is designed to be compatible with standard gastroscopes, promoting scalability and clinical adoption.
Clinical Implications
The introduction of this robotic system may help reduce the technical barriers associated with ESD.
Conclusion
The novel robotic platform shows potential in enhancing the feasibility and safety of ESD.