Clinical Report: Magnetically Actuated Contactless Robotic System for Advancing Linear Catheters
Background
Cardiovascular diseases are a leading cause of mortality, with catheter-based interventions being crucial for treatment. However, traditional catheter navigation poses risks of complications and operator strain. Robotic systems like FlyCaD may address these challenges.
Data Highlights
No numerical data or trial results were provided in the source material.
Key Findings
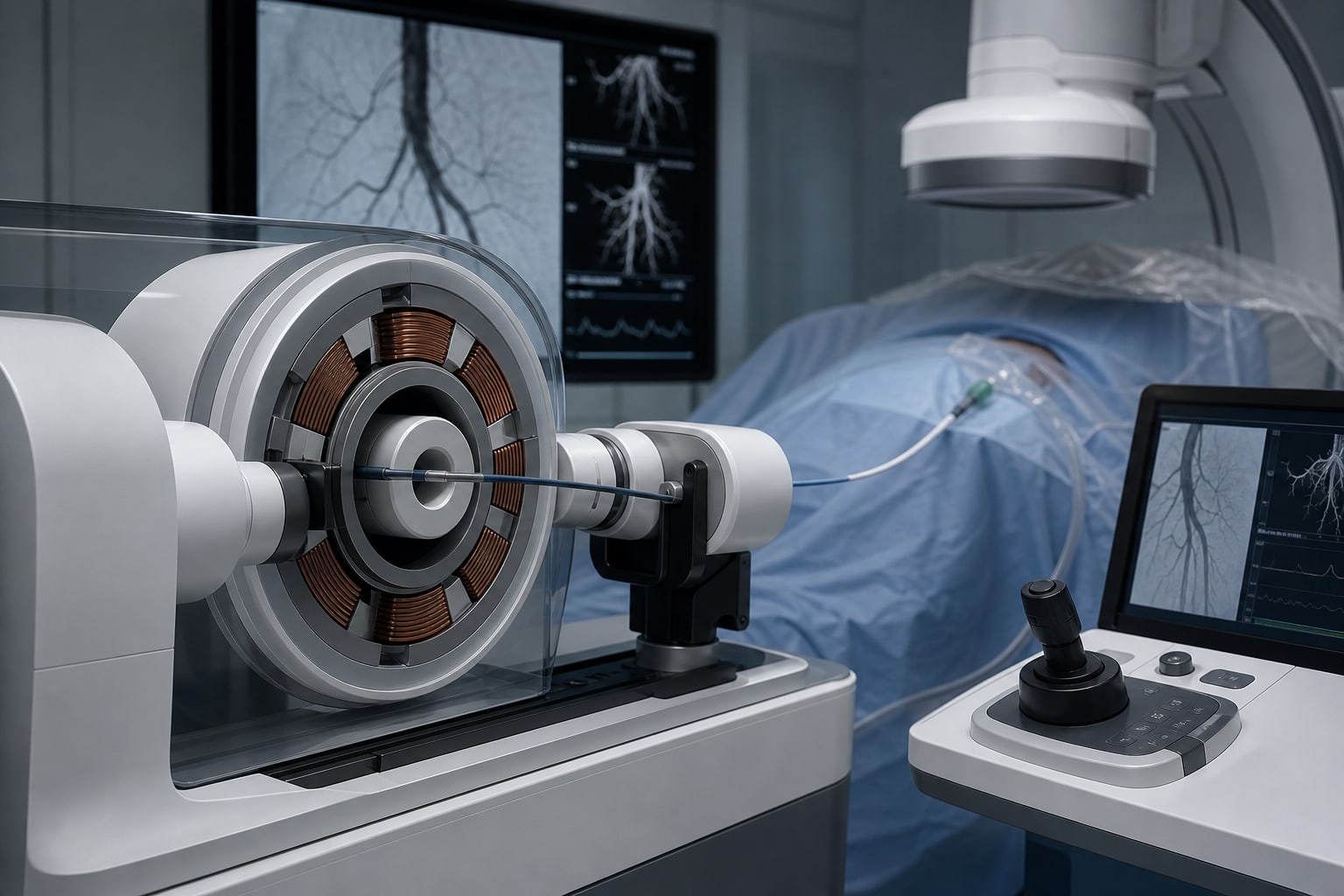
The FlyCaD system utilizes magnetic actuation to transmit torque across a sterile barrier, allowing for contactless catheter manipulation.
It features a disposable cartridge that maintains sterility while enabling compatibility with commercial catheters.
The system allows for bidirectional catheter rotation and advancement through a controlled gripping mechanism.
Linear catheter advancement is achieved through a sequence of gripping, translating, and releasing the catheter.
The prototype was evaluated in simulated endovascular conditions using transparent vascular phantoms.
Clinical Implications
The FlyCaD system's design allows for easier sterilization and compatibility with existing catheter technologies.
Conclusion
The development of the FlyCaD prototype represents a significant advancement in robotic catheter systems.