A novel bimanual endoluminal robotic platform compatible with standard gastroscopes for endoscopic submucosal dissection: preclinical feasibility and ergonomic evaluation - Summary - MDSpire
Advertisement
A novel bimanual endoluminal robotic platform compatible with standard gastroscopes for endoscopic submucosal dissection: preclinical feasibility and ergonomic evaluation
To evaluate the feasibility and ergonomics of a novel endoluminal robotic platform designed to enhance endoscopic submucosal dissection (ESD) using standard gastroscopes.
Approach:
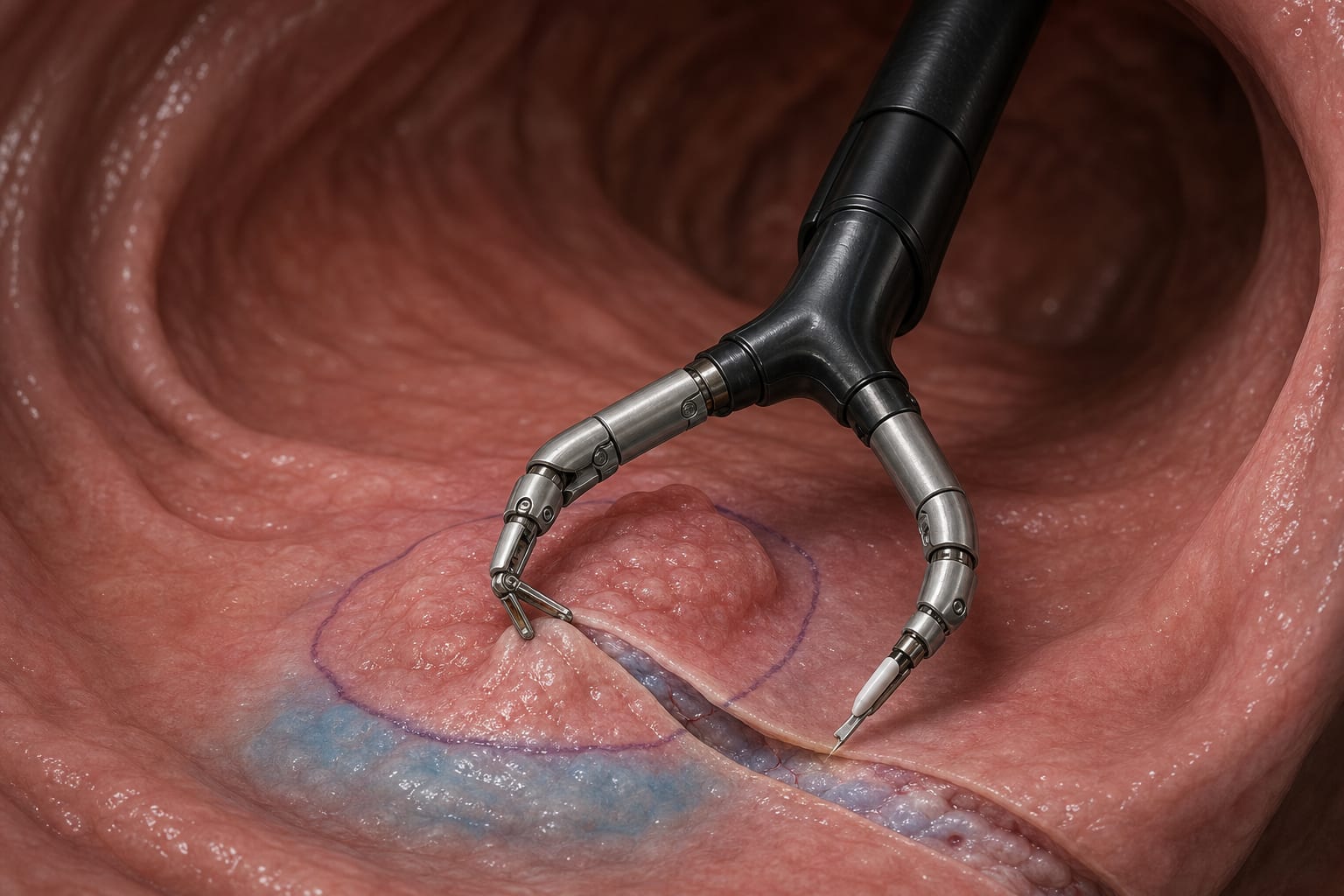
Robotic Platform Architecture: The Intilume System consists of a portable positioning cart and a surgeon console, allowing two robotic instruments to be controlled via motion-tracked pen controllers while maintaining the functionality of the standard gastroscope.
Study Design: A randomized crossover trial was conducted using isolated porcine stomachs to compare robotic-assisted ESD with conventional ESD, involving novice and intermediate endoscopists.
Key Findings:
Robotic assistance may enable faster and safer ESD by providing bimanual coordination and triangulation.
The robotic platform allows for intuitive manipulation of instruments while maintaining ergonomic posture for the operator.
Interpretation:
The study suggests that the robotic system could address the technical challenges associated with ESD, potentially facilitating broader clinical adoption.
Limitations:
The study was conducted in an ex vivo model, which may not fully replicate clinical conditions.
The sample size was limited to 16 ESD procedures, which may affect the generalizability of the findings.
Conclusion:
The novel robotic platform shows promise in enhancing the feasibility and ergonomics of ESD, warranting further investigation in clinical settings.