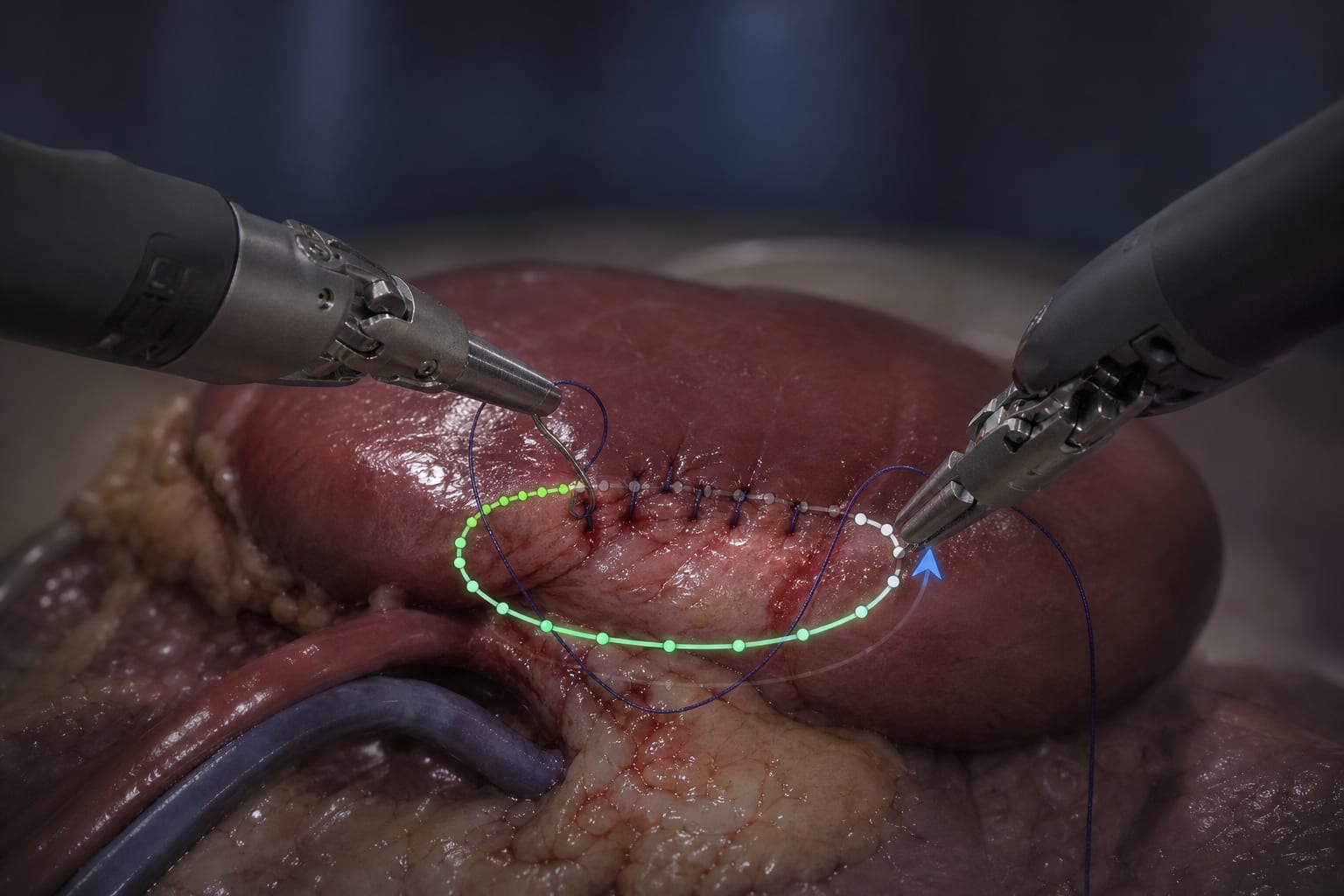
To develop and evaluate an artificial intelligence framework that learns expert suturing trajectories from standard endoscopic video and provides intraoperative visual guidance for renal wound suturing training.
Approach:
Dataset Construction: A multicenter expert trajectory dataset was created from robot-assisted partial nephrectomy procedures, including scene annotation, suturing action labeling, and trajectory sampling.
Model Development: A Scene-Aware Transformer was developed to predict future suturing trajectories by integrating instrument motion with surgical scene context.
Feasibility Study: The guidance system was prospectively evaluated in a pilot training study involving 24 novice trainees.
Key Findings:
The dataset included 18,515 annotated frames, 806 complete suturing actions, and 24,897 valid trajectory samples.
The model achieved an average displacement error of 34.25 pixels and a final displacement error of 52.54 pixels.
Novice trainees receiving expert trajectory guidance significantly outperformed the unguided control group across six of eight performance measures.
Interpretation:
Limitations:
The prospective training component was a single-institution feasibility study.
There was no assessment of long-term retention or clinical transfer.
Conclusion:
Larger multicenter randomized trials are warranted before broader integration into surgical training curricula.
In partnership with members and industry stakeholders, OOSS supports strategies that enhance patient and physician experience, drive operational performance, and enable long-term growth.